16 آذار 2025 الساعة 21:56
ابتكار روبوت يسمح للأطباء بإجراء العمليات بأقدامهم!
غزة(الاتجاه الديمقراطي)
يشهد القطاع الطبي في بعض دول العالم طفرة جديدة في استخدام التكنولوجيا الروبوتية الطبية التي تساعد الجراحين في إجراء وتنفيذ العمليات والإجراءات الجراحية. الآن، سيتمكن الجراحون من إجراء الجراحة ليس فقط باستخدام أيديهم، ولكن أيضًا باستخدام أقدامهم عن طريق روبوت.
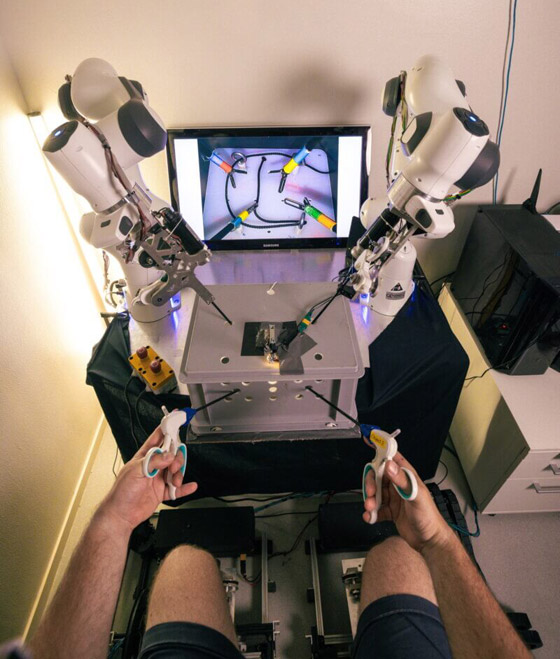
قدم فريق في سويسرا أول نظام قادر على تسهيل الجراحة بالمنظار بأربعة أذرع. يسمح هذا النظام المبتكر للجراحين بالتحكم في ذراعين آليين إضافيين باستخدام أدوات تحكم تعمل بالقدم. وتم تطوير الروبوت الجديد من قبل جامعة الأبحاث السويسرية، EPFL، والتي تسلط الضوء على قدرتها على تزويد الجراحين، بالإضافة إلى ذراعيهم الطبيعيين، بالسيطرة على ذراعين آليين إضافيين. يتم التحكم في هذه الأذرع باستخدام واجهات لمسية للقدم تسمح بخمس درجات من الحرية.
تؤكد النتائج المنشورة في المجلة الدولية لأبحاث الروبوتات، جدوى النظام الجديد، إلى جانب قدرته على تقليل عبء العمل على الجراحين مع زيادة دقة الإجراءات وأمانها. وتلقى المتخصصون بالفعل تدريبًا ناجحًا على النظام، وتجري حاليًا التجارب السريرية في جنيف.
ضمن هذا النظام المبتكر، تتلاعب كل يد من يد الجراح بأداة بينما تقوم إحدى القدمين بتشغيل المنظار / الكاميرا، وتدير الأخرى قابض مدفوع. أحد الابتكارات الرئيسية للنظام هو التحكم المشترك بين الجراح والمساعدين الروبوتيين. ويضمن إطار التحكم، الذي طوره فريق البحث، أن يعمل الجراح والروبوتات معًا في مساحة عمل متزامنة، مما يفي بمتطلبات الدقة والسلامة الحاسمة في الجراحة التنظيرية.
كيف يعمل الروبوت؟
يقول محمد بوري رئيس مجموعة البحوث REHAssist في بيان صحفي: "تقدم المحركات في دواسات القدم ردود فعل لمسية للمستخدم، وتوجه القدم نحو الهدف كما لو كانت تتبع مجال قوى غير مرئي، وتحد أيضًا من القوة والحركة لضمان أن حركات القدم الخاطئة لا تعرض المريض للخطر".
ويضيف "بوري": "يفتح نظامنا إمكانيات جديدة للجراحين لإجراء عمليات تنظير البطن بأربعة أيد، مما يسمح لشخص واحد بأداء مهمة يتم إجراؤها عادةً بواسطة شخصين، وأحيانًا ثلاثة أشخاص". ويتابع: "من خلال دمج المساعدين الروبوتيين الذين يتم التحكم بهم بالقدم واستراتيجيات التحكم المشتركة، فإننا نحد من العبء العقلي والبدني على الجراحين ونفترض تحسين النتائج الجراحية".
فيما يقول البروفيسور أود بيلارد، رئيس LASA: "التحكم في أربعة أذرع في وقت واحد ، علاوة على ذلك بأقدام المرء، بعيد كل البعد عن الروتين ويمكن أن يكون متعبًا للغاية. لتقليل تعقيد التحكم، تساعد الروبوتات الجراح بفعالية من خلال تنسيق حركاته مع الجراح من خلال التنبؤ النشط لنية الجراح والتتبع البصري التكيفي لأدوات المنظار بالكاميرا. بالإضافة إلى ذلك ، يتم تقديم المساعدة لإمساك الأنسجة بمزيد من الدقة".
ووفقًا للدكتور إنريكو بروينيمان، الذي شارك في التجارب بالتعاون مع المؤسسة السويسرية للابتكار والتدريب في الجراحة (SFITS): "فكرة استخدام قدم المرء بنشاط لإجراء جراحة بمساعدة الروبوت فكرة جيدة، وهي بالتأكيد مهارة قابلة للتعلم. أود أن أراها مطبقة في غرفة العمليات، ربما كقمرة قيادة بعيدة عن المريض لزيادة بيئة العمل".
يشهد القطاع الطبي في بعض دول العالم طفرة جديدة في استخدام التكنولوجيا الروبوتية الطبية التي تساعد الجراحين في إجراء وتنفيذ العمليات والإجراءات الجراحية. الآن، سيتمكن الجراحون من إجراء الجراحة ليس فقط باستخدام أيديهم، ولكن أيضًا باستخدام أقدامهم عن طريق روبوت.
قدم فريق في سويسرا أول نظام قادر على تسهيل الجراحة بالمنظار بأربعة أذرع. يسمح هذا النظام المبتكر للجراحين بالتحكم في ذراعين آليين إضافيين باستخدام أدوات تحكم تعمل بالقدم. وتم تطوير الروبوت الجديد من قبل جامعة الأبحاث السويسرية، EPFL، والتي تسلط الضوء على قدرتها على تزويد الجراحين، بالإضافة إلى ذراعيهم الطبيعيين، بالسيطرة على ذراعين آليين إضافيين. يتم التحكم في هذه الأذرع باستخدام واجهات لمسية للقدم تسمح بخمس درجات من الحرية.
تؤكد النتائج المنشورة في المجلة الدولية لأبحاث الروبوتات، جدوى النظام الجديد، إلى جانب قدرته على تقليل عبء العمل على الجراحين مع زيادة دقة الإجراءات وأمانها. وتلقى المتخصصون بالفعل تدريبًا ناجحًا على النظام، وتجري حاليًا التجارب السريرية في جنيف.
ضمن هذا النظام المبتكر، تتلاعب كل يد من يد الجراح بأداة بينما تقوم إحدى القدمين بتشغيل المنظار / الكاميرا، وتدير الأخرى قابض مدفوع. أحد الابتكارات الرئيسية للنظام هو التحكم المشترك بين الجراح والمساعدين الروبوتيين. ويضمن إطار التحكم، الذي طوره فريق البحث، أن يعمل الجراح والروبوتات معًا في مساحة عمل متزامنة، مما يفي بمتطلبات الدقة والسلامة الحاسمة في الجراحة التنظيرية.
كيف يعمل الروبوت؟
يقول محمد بوري رئيس مجموعة البحوث REHAssist في بيان صحفي: "تقدم المحركات في دواسات القدم ردود فعل لمسية للمستخدم، وتوجه القدم نحو الهدف كما لو كانت تتبع مجال قوى غير مرئي، وتحد أيضًا من القوة والحركة لضمان أن حركات القدم الخاطئة لا تعرض المريض للخطر".
ويضيف "بوري": "يفتح نظامنا إمكانيات جديدة للجراحين لإجراء عمليات تنظير البطن بأربعة أيد، مما يسمح لشخص واحد بأداء مهمة يتم إجراؤها عادةً بواسطة شخصين، وأحيانًا ثلاثة أشخاص". ويتابع: "من خلال دمج المساعدين الروبوتيين الذين يتم التحكم بهم بالقدم واستراتيجيات التحكم المشتركة، فإننا نحد من العبء العقلي والبدني على الجراحين ونفترض تحسين النتائج الجراحية".
فيما يقول البروفيسور أود بيلارد، رئيس LASA: "التحكم في أربعة أذرع في وقت واحد ، علاوة على ذلك بأقدام المرء، بعيد كل البعد عن الروتين ويمكن أن يكون متعبًا للغاية. لتقليل تعقيد التحكم، تساعد الروبوتات الجراح بفعالية من خلال تنسيق حركاته مع الجراح من خلال التنبؤ النشط لنية الجراح والتتبع البصري التكيفي لأدوات المنظار بالكاميرا. بالإضافة إلى ذلك ، يتم تقديم المساعدة لإمساك الأنسجة بمزيد من الدقة".
ووفقًا للدكتور إنريكو بروينيمان، الذي شارك في التجارب بالتعاون مع المؤسسة السويسرية للابتكار والتدريب في الجراحة (SFITS): "فكرة استخدام قدم المرء بنشاط لإجراء جراحة بمساعدة الروبوت فكرة جيدة، وهي بالتأكيد مهارة قابلة للتعلم. أود أن أراها مطبقة في غرفة العمليات، ربما كقمرة قيادة بعيدة عن المريض لزيادة بيئة العمل".
اخبار متعلقة











أضف تعليق